
Controler integrat pentru robotică
Pentru aplicaţii care necesită procesare de mare viteză pentru controlul utilajelor, securitate, fiabilitate şi uşurinţă în întreţinere.
Controlerul nostru integrat pentru robotică sincronizează perfect tehnologia automatizării, astfel încât clienţii să poată îmbunătăţi viteza şi acurateţea producţiei, să poată simula întreaga linie de producţie, să simplifice întreţinerea şi să reducă timpul până la punerea pe piaţă.
- Control pentru maximum 8 roboţi cu o singură unitate de procesare (CPU)
- Integrarea roboticii, logicii şi controlul mişcării într-o singură unitate de procesare (CPU)
- În conformitate cu standardul de programare IEC 61131-3 (JIS B 3503) şi funcţii bloc PLCopen pentru controlul mişcării
- În conformitate cu standardul de programare IEC 61131-3 (JIS B 3503) şi scripting tradiţional V+ pentru controlul robotului şi al mişcării
- Programarea cu variabile permite utilizatorilor să creeze în mod eficient programe complexe
- Modele cu funcţionalitate de baze de date SQL
- Asigură viteză fără să compromită fiabilitatea şi robustețea specifică PLC-urilor.
- Interpolare liniară şi circulară.
- Sincronizare electronică a angrenajului şi a camei.
- Control rapid şi precis prin sincronizarea tuturor dispozitivelor EtherCAT, precum cameră video, servomecanisme, roboţi şi IO, cu controlerul.
- Asigură viteză fără a compromite fiabilitatea.
Specificaţii şi informaţii pentru comenzi
| Produs | Supports DB connection | Max. number of robots | Max. number of synchronous axes | Primary task cycle time | Program memory | Variables memory | Communication port(s) | Max. number of remote I/O nodes | Supports sequence control | Supports motion control | Supports robotics control | Descriere | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
No | 8 | 16 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Robotic Integrated Controller NJ5: 8 robots and 16 servo axes |
|
|
|
Yes | 8 | 16 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Robotic Integrated Controller NJ5: 8 robots and 16 servo axes, SQL client |
|
|
|
No | 8 | 32 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Robotic Integrated Controller NJ5: 8 robots and 32 servo axes |
|
|
|
Yes | 8 | 32 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Robotic Integrated Controller NJ5: 8 robots and 32 servo axes, SQL client |
|
|
|
No | 8 | 64 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Robotic Integrated Controller NJ5: 8 robots and 64 servo axes |
|
|
|
Yes | 8 | 64 | 0.5 ms | 20 MB | 6 MB | EtherCAT Master, EtherNet/IP, USB | 192 | Yes | Yes | Yes | Robotic Integrated Controller NJ5: 8 robots and 64 servo axes, SQL client |
|
Aveţi nevoie de asistenţă?
Suntem aici pentru a vă ajuta! Contactaţi-ne, iar specialiştii noştri vă vor ajuta să găsiţi cea mai bună soluţie pentru afacerea dvs.
Contactați-mă Controler integrat pentru robotică

Vă mulțumim pentru solicitarea trimisă. Vom reveni cu un răspuns cât mai curând posibil.
Întâmpinăm dificultăţi tehnice. . Formularul dumneavoastră nu a fost preluat cu succes. Vă rugăm să acceptaţi scuzele noastre şi să încercaţi încă odată mai târziu. Detalii: [details]
Ofertă pentru Controler integrat pentru robotică
Prin completarea acestui formular puteţi face o cerere de ofertă. Vã rugãm completaţi toate câmpurile marcate cu *. Datele dumneavoastrã personale vor fi tratate cu confidențialitate.
Vă mulțumim pentru cererea de ofertă trimisă. Vă vom oferi informațiile cerute în cel mai scurt timp posibil.
Întâmpinăm dificultăţi tehnice. . Formularul dumneavoastră nu a fost preluat cu succes. Vă rugăm să acceptaţi scuzele noastre şi să încercaţi încă odată mai târziu. Detalii: [details]
Caracteristici
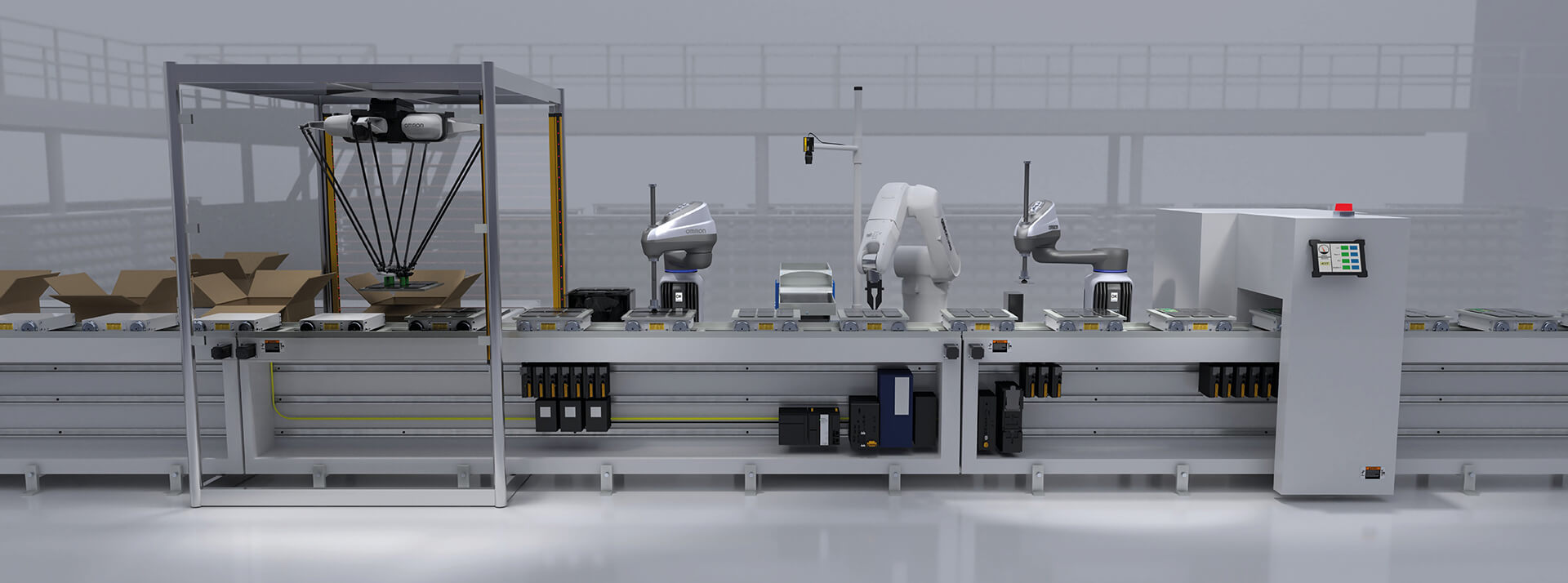
Platforma robotică integrată constituie următorul pas revoluţionar în cadrul ecosistemului SYSMAC, care integrează perfect linia completă de produse de robotică fixă ORT.
Integrare totală (Control): Control automatizare unificat + robotică
Integrarea proceselor (Timp mai redus pentru punerea pe piaţă): Aplicaţiile pot fi dezvoltate din etapa de design până la exploatare, operare şi îmbunătăţire continuă
Integrarea lanţului de aprovizionare (Flexibilitate): Utilizatorii pot reprograma cu uşurinţă (PLC şi roboţi), pot modifica sau scala producţia, asigurând flexibilitatea necesară pentru adaptarea la cerinţe fluctuante Controlerul NJ-R cu noul procesor integrat în robot acceptă până la 8 roboţi, precum şi comenzi independente de deplasare axială.
6 procesoare:
- NJ501-R300: 8 roboţi + 16 axe de deplasare
- NJ501-R400: 8 roboţi + 32 axe de deplasare
- NJ501-R500: 8 roboţi + 64 axe de deplasare
- NJ501-R320: 8 roboţi + 16 axe de deplasare + Funcţionalitate SQL
- NJ501-R420: 8 roboţi + 32 axe de deplasare + Funcţionalitate SQL
- NJ501-R520: 8 roboţi + 64 axe de deplasare + Funcţionalitate SQL
Beneficii pentru client
- Evaluare mai rapidă (integrator de sisteme şi OEM)
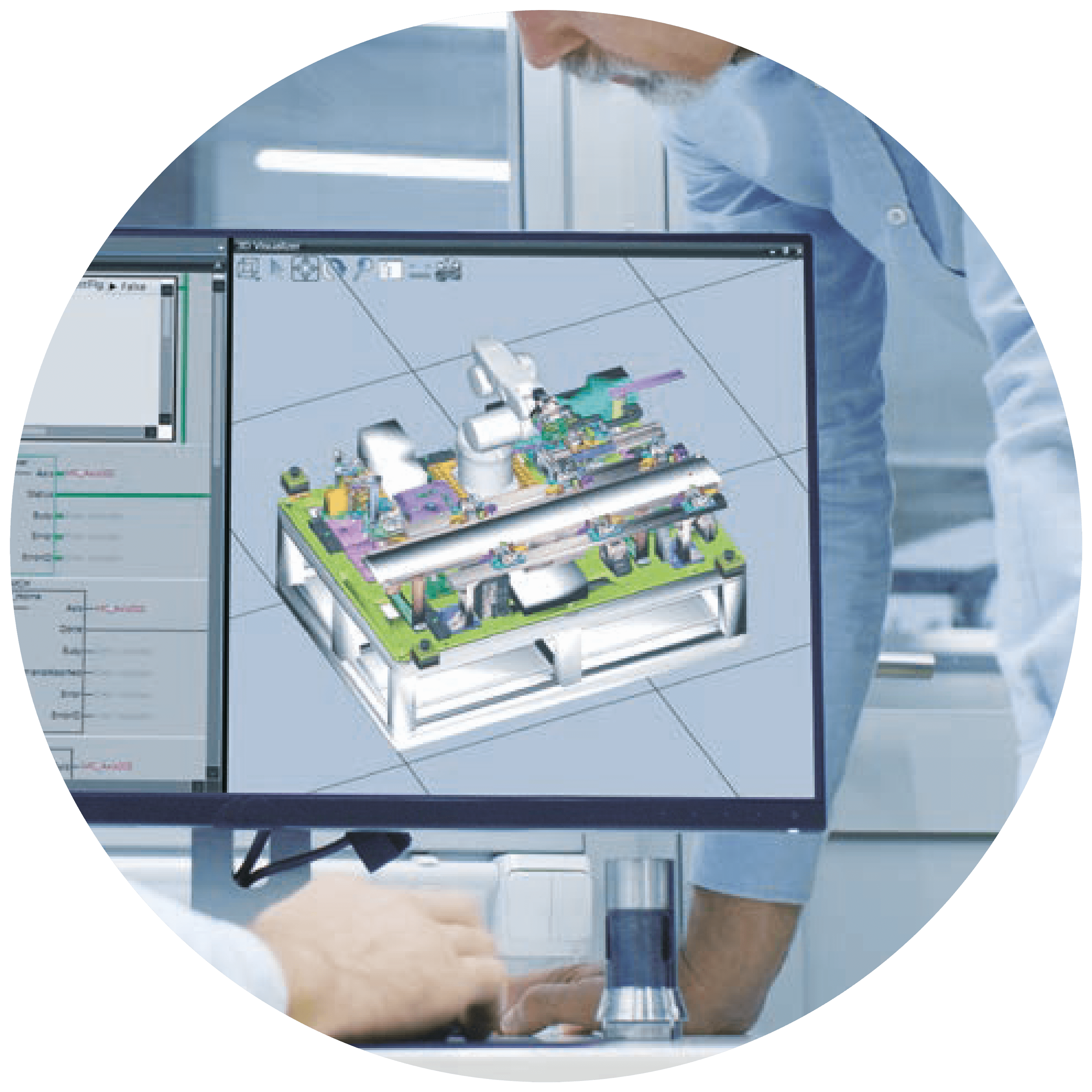
- Calcul al rentabilităţii şi validări de proiect mai rapide datorită software-ului de simulare
- Îmbunătăţirile prin schimbarea pieselor pentru produsele viitoare pot fi validate prin simulare.
- Costul investiţiei poate fi calculat în prealabil.
- Estimarea duratei ciclului
- Conceptualizare şi planificare îmbunătăţite

Timp mai redus de dare în exploatare (integrator de sisteme şi OEM)
- Reduceţi timpul de integrare prin programare off-line.
- Modulele Xpert reduc timpul de integrare şi curba de învăţare.
- Reduceţi sarcina de proiectare mecanică şi electrică prin emularea celulelor complete prin intermediul Sysmac Platform.
Cost de exploatare mai redus
- Sincronizarea în timp real între robot şi PLC (controlul deplasării şi celelalte dispozitive ECAT) îmbunătăţeşte productivitatea.
- Managerul de reţete facilitează modificările şi reduce la minimum timpul necesar pentru schimbările de produs.
Tehnologie
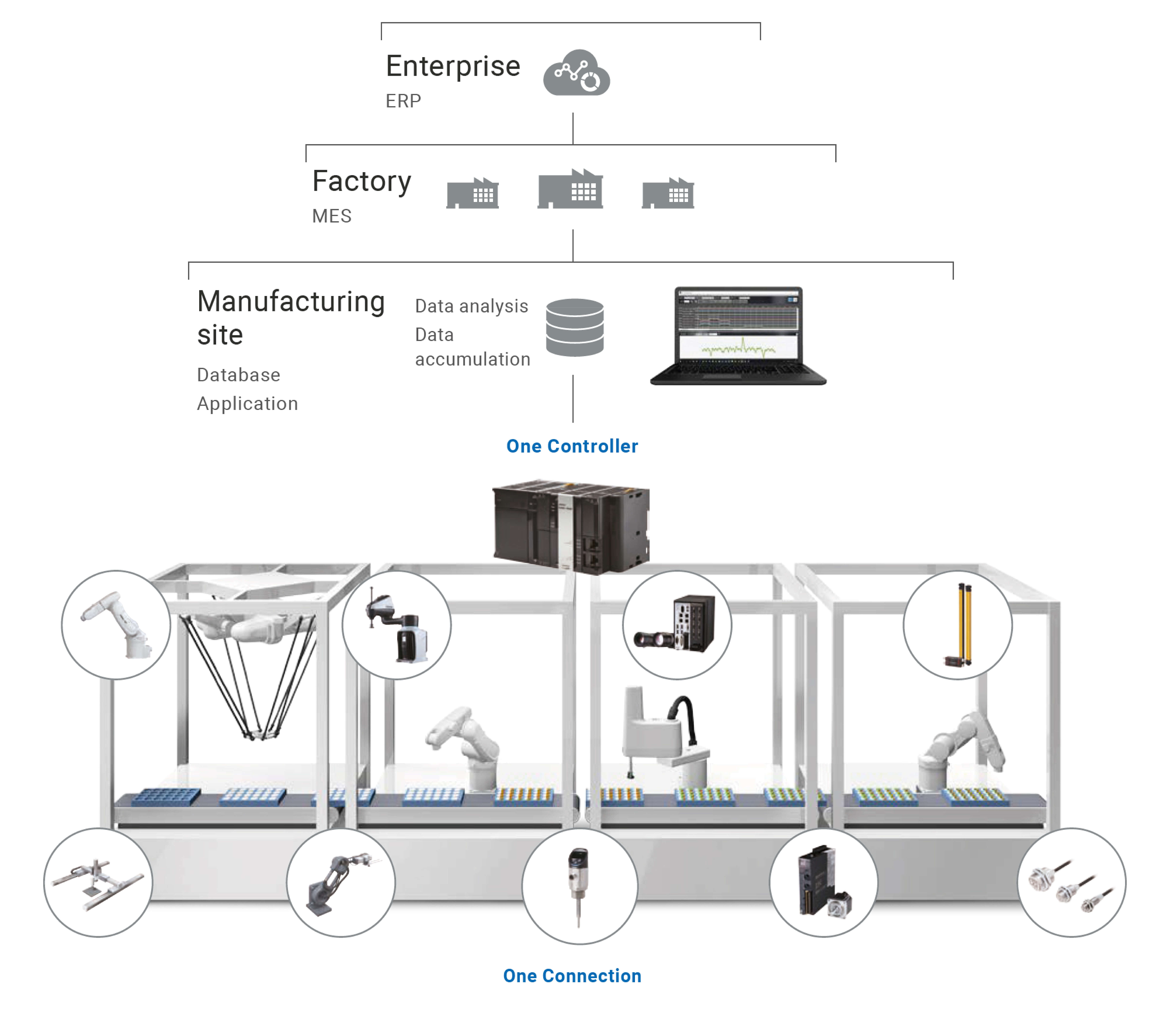
Abordare Un singur controler: integrarea perfectă, facilă a secvenţelor, deplasărilor şi controlului roboţilor
Abordarea noastră de tip Un singur controler integrează controlul roboţilor, pe lângă controlul secvenţelor şi al deplasării, într-un singur controler. Acest lucru permite controlul sincronizat al roboţilor şi al altor dispozitive. Totodată, permite ca utilizatorii să colecteze informaţii despre dispozitive, aliniate la o cronologie comună, fiind astfel practic de folosit.
Integrare din sistemele
- ERP al întreprinderii
- MES al fabricii
- Locul producţiei – Aplicaţii de baze de date şi analiză
- Linie de producţie prin integrarea diverselor produse
Produse conexe
-

Îmbunătăţiţi-vă productivitatea
-

Robot articulat pentru prelucrare, asamblare şi manipularea materialelor
-

Robot SCARA pentru prelucrare şi asamblare de precizie şi pentru manipularea precisă a materialelor
-

Obţineţi o productivitate mai ridicată, cu o sarcină utilă mai mare şi o durată a ciclului mai redusă
-

Robot paralel ideal pentru utilizarea în industria alimentară şi a băuturilor, farmaceutică şi de îngrijire a sănătăţii
-

Robotul paralel cu patru axe asigură viteză mare şi precizie ridicată
Documentare



Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.
_cg_en.jpg)
Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.





Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.

_cg_en.jpg)

_cg_en.jpg)
_cg_en.jpg)

_cg_en.jpg)







Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.
Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.
Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.

Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.

Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.
Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.
_cg_en.jpg)
Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.

Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.

Vă rugăm să vă conectaţi sau înregistrare la conţinutul de pe această pagină.




