CK3M și CK5M
Controler programabil pentru axe multiple
Controlul multi-axă cu cel mai rapid timp de ciclu servo de 50 µs/5 axe permite prelucrarea cu precizie
- Axe locale pentru precizie la scară nanometrică
- Control sincronizat de viteză ultra-înaltă (50 µs/5 axe)
- Algoritmi personalizaţi de stabilizare a servomotoarelor
- Flexibilitate în utilizarea de dispozitive de acţionare şi encodere de la mai mulţi furnizori
- Flexibilitate în programare în limbaj G-code, ANSI C sau în limbajul de programare original
- EtherCAT pentru o configurare flexibilă
- Design modular şi montare pe şină DIN
Specificaţii şi informaţii pentru comenzi
| Produs | Type of module | CPU clock frequency | Max. number of axes via EtherCAT | Max. number of axis interface units | Amplifier interface | Encoder interface | Digital output type | Number of digital inputs | Number of digital outputs | Number of analog inputs | Descriere | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
CK3M Motion Control CPU | 1.0 GHz | 0 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, No EtherCAT. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 4 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 4 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 8 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 8 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
Analog I/O | 4 | CK3W Analog IN, 4 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Analog I/O | 8 | CK3W Analog IN, 8 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, PNP |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | NPN | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | PNP | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, PNP |
|
||||||
|
|
Encoder input | Not Applicable | Special Serial Protocol | Encoder Input Unit for CK3M, Serial encoder 4 channels, BiSS-C, Endat2.2, and R88M-1Lx/-1Mx Motor built-in encoder |
|
|||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, TCR, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100 | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100, TCR | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Digital I/O | NPN | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, NPN |
|
||||||
|
|
Digital I/O | PNP | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, PNP |
|
||||||
|
|
CK5M Motion Control CPU | 1.6 GHz | 16 | 8 | 0 | 0 | 0 | CK5M Quad Core 1040 CPU, 2 GB RAM, 4 GB Flash, 16 EtherCAT axes. Up to 8 axis interface units can be connected via Expansion units, max 32 axis local. |
|
|||
|
|
CK5M Motion Control CPU | 1.6 GHz | 32 | 8 | 0 | 0 | 0 | CK5M Quad Core 1040 CPU, 2 GB RAM, 4 GB Flash, 32 EtherCAT axes. Up to 8 axis interface units can be connected via Expansion units, max 32 axis local. |
|
Cum vă putem ajuta?
Dacă aveţi întrebări sau doriţi să cereţi o ofertă, contactaţi-ne sau trimiteţi-ne o solicitare.
Contactați-mă CK3M și CK5M

Vă mulțumim pentru solicitarea trimisă. Vom reveni cu un răspuns cât mai curând posibil.
Întâmpinăm dificultăţi tehnice. . Formularul dumneavoastră nu a fost preluat cu succes. Vă rugăm să acceptaţi scuzele noastre şi să încercaţi încă odată mai târziu. Detalii: [details]
DownloadOfertă pentru CK3M și CK5M
Prin completarea acestui formular puteţi face o cerere de ofertă. Vã rugãm completaţi toate câmpurile marcate cu *. Datele dumneavoastrã personale vor fi tratate cu confidențialitate.
Vă mulțumim pentru cererea de ofertă trimisă. Vă vom oferi informațiile cerute în cel mai scurt timp posibil.
Întâmpinăm dificultăţi tehnice. . Formularul dumneavoastră nu a fost preluat cu succes. Vă rugăm să acceptaţi scuzele noastre şi să încercaţi încă odată mai târziu. Detalii: [details]
DownloadCaracteristici

Design modular
Designul modul vă permite să combinaţi fără restricţii modelul CK3M cu până la două unităţi de interfaţă axială, pentru a facilita o varietate de aplicaţii.
Power PMAC IDE (mediu de dezvoltare integrat)
- Bazat pe Microsoft® Visual Studio®
- Limbaj de programare ANSI C sau original
- Reglare facilă
- Setare simplă
- Depanare
- Instrument de depanare
Cinematică complexă
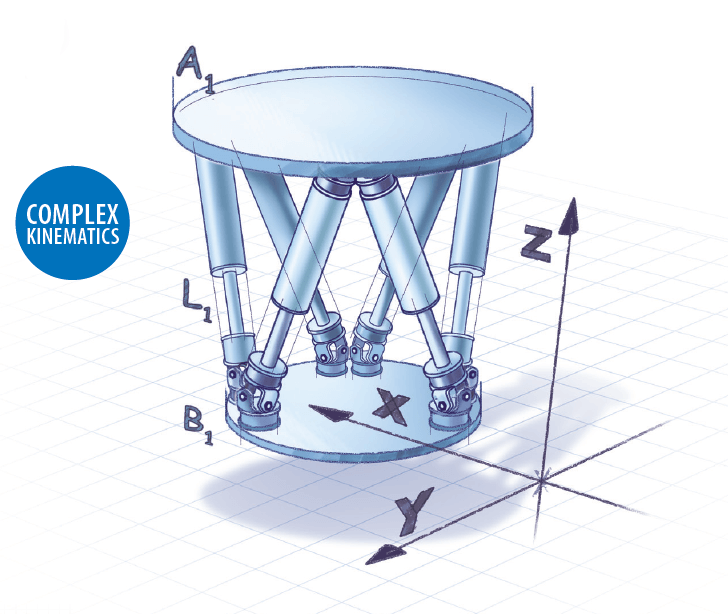
Sistemele mecanice complexe pot fi controlate datorită prelucrării matricelor şi conversiei spaţiului. Aplicaţii speciale, precum poziţionarea oglinzii telescopului Hexapod, pot fi operate cu uşurinţă cu ajutorul funcţionalităţii de gestionare a cinematicii.
Utilizează funcţii pentru aplicaţii de prelucrare precisă
G-Code
Interpretor standard G-Code RS-274. Subrutine redactabile de către utilizator pentru implementarea personalizată a codurilor G, M, T şi D. Flexibilitate la adaptarea sintaxei şi pentru a lucra în combinaţie cu orice program CAD/CAM.
Compensare uzură unealtă de prelucrare 2D/3D
Compensarea diametrului și formei uneltei de prelucrare, pentru a realizarea exactă a punctul de tăiere conform specificaţiilor din G-Code.
Procesor rapid şi buffer de program mare
Procesorul rapid poate trata peste 10.000 de blocuri pe secundă şi programe piesă de până la 1 Gb.
Reconstituire bloc pentru reversare traseu
Traseul poate fi reversat, pentru îndepărtarea sculei din zona de aşchiere.
Comenzi bloc Look Ahead avansate (Advanced Block Lookahead)
Instrucţiunile din buffer sunt analizate în avans, mişcările sunt combinate şi optimizate ca viteză şi acceleraţie, pentru performanţe superioare.
Gestionarea sculelor cu prelucrare tangenţială
Sculele cu direcţie de aşchiere necesită o poziţionare tangenţială față de sensul de lucru.
Software
Power PMAC IDE
Acest software de computer este utilizat pentru a configura, crea programe utilizator şi depana programele pentru controlerele programabile cu axe multiple NY51-A şi CK3E.
Produse conexe
-

CK3E, controler programabil pentru axe multiple
-

Performanţă şi caracter practic pentru comanda utilajelor
-

Sysmac, Servo de uz general
Documentare














_getting_started_guide_en.jpg)